Robot 2, démonstration
Une question, un problème ou une suggestion, n'hésitez pas : un petit mail
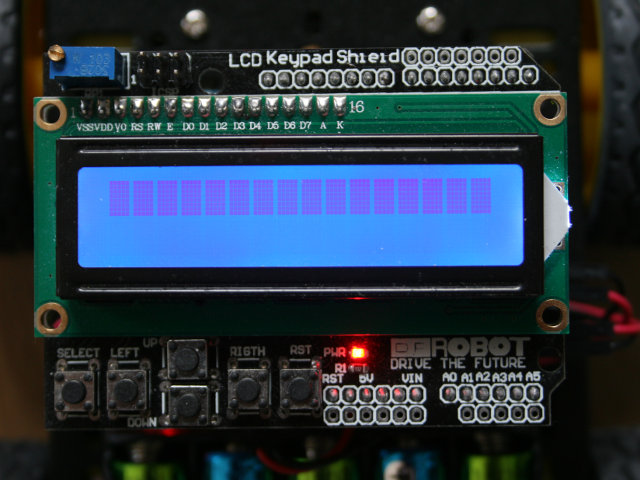
La mise sous tension
Pour cette page de démonstration, on suppose que le robot est monté, son programme chargé et que le robot a été apairé (au sens bluetooth) avec le téléphone Android.
Voir les pages montage ou logiciel si ce n'est pas encore le cas.
A la mise sous tension, le retro-éclairage de l'afficheur s'allume.
Le message d'accueil
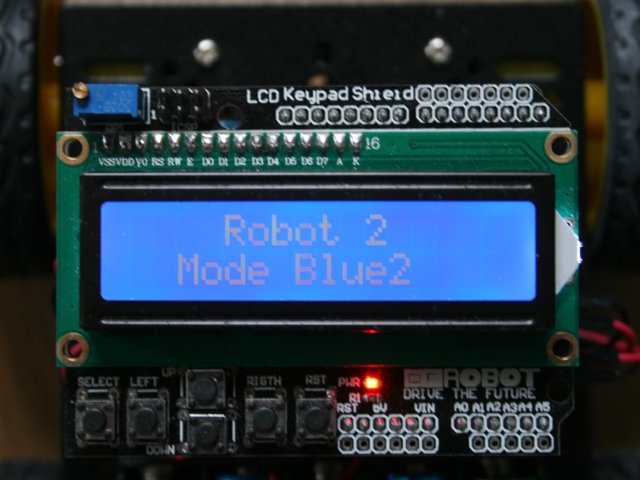
Au bout de quelques secondes, un message d'accueil s'affiche pendant que le robot initialise son logiciel et les cartes d'extension.
Fin de l'initialisation
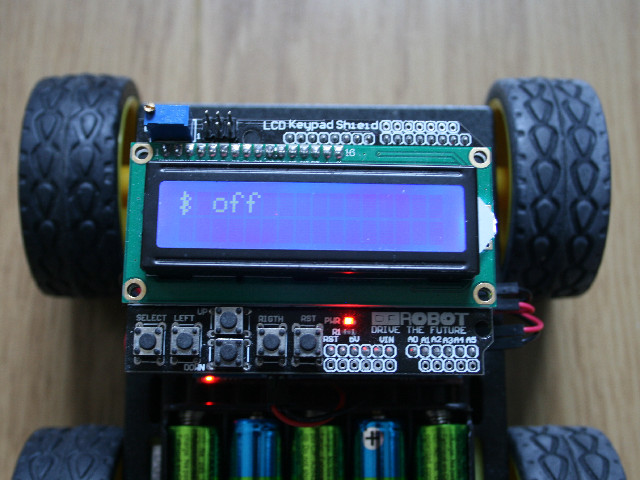
A la fin de l'initialisation, le symbole bluetooth s'affiche avec l'état de la liaison (ici off car le programme du téléphone n'est pas encore lancé).
Lancement du programme Android


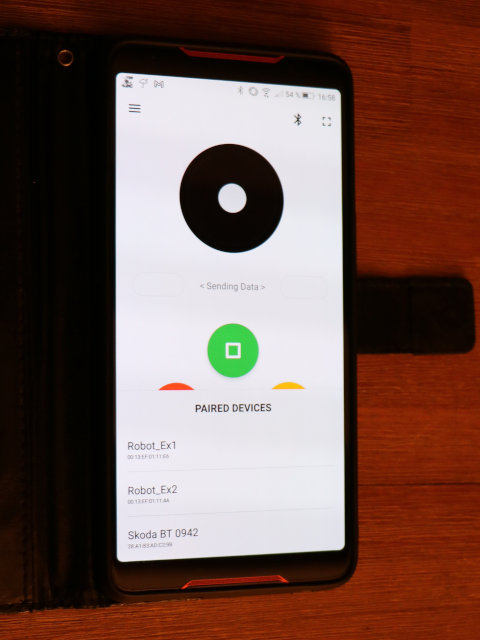
Le programme Android (Arduino Bluetooth Controlled Joysitck) se lance avec l'icone (image de gauche).
Après un écran d'accueil rapide, vous arrivez à l'interface principale du programme (image au milieu).
On sélectionne le robot à utiliser en cliquant sur l'icone bluetooth et sélectionnant (image de droite) le périphérique ad-hoc (appairé au préalable au sens bluetooth).
Communication établie
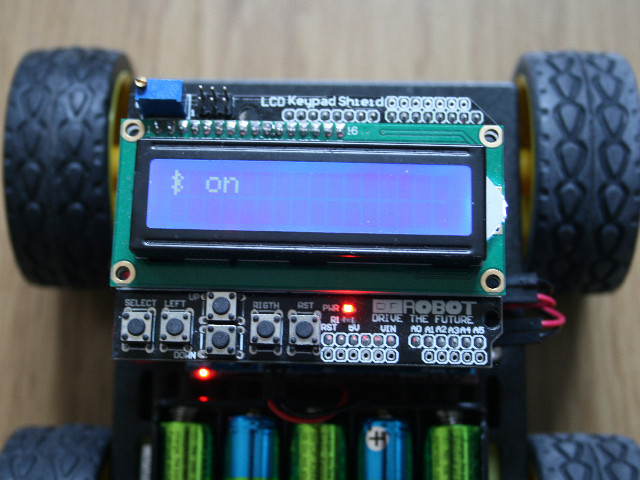
Une fois la communication établie (quelques secondes), l'afficheur du robot passe à "on" et un message s'affiche sur le téléphone.
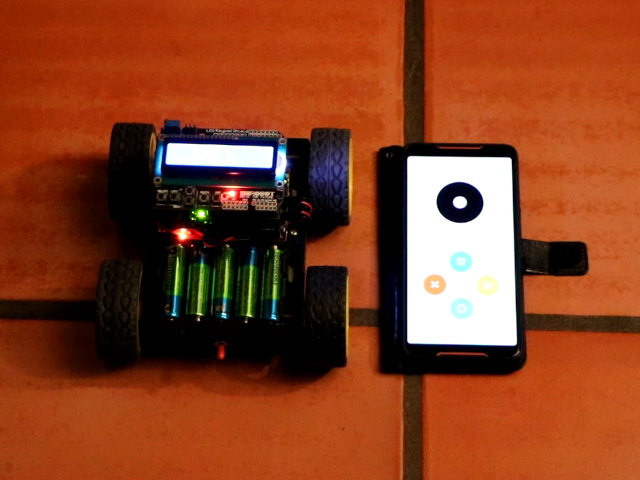
Les commandes Arduino Bluetooth Controlled Joysitck

Le programme Arduino Bluetooth Controlled Joysitck commande le robot via le joystick.
C'est parti !
Ne reste plus qu'à jouer !
En plus de jeu d'adresse ou de vitesse, vous pouvez faire des combats entre deux robots. L'objectif sera alors de se placer derrière le robot de l'adversaire et avec vos roues de faire basculer l'interrupteur de l'adversaire. Pas de contestation possible !