Robot 2, électronique
Une question, un problème ou une suggestion, n'hésitez pas : un petit mail
Les cartes électroniques
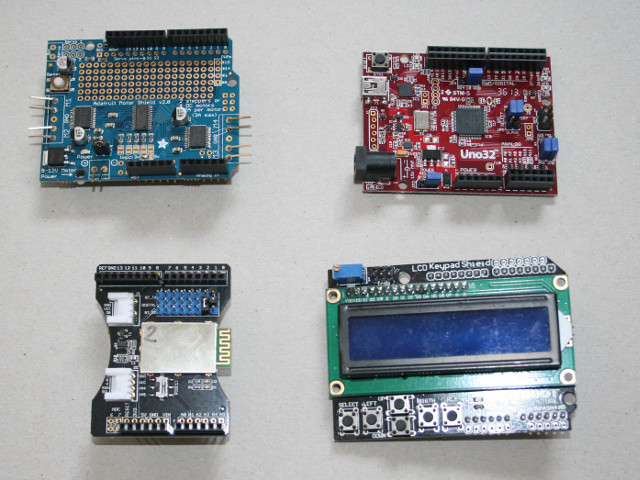
Le robot nécessite une carte Arduino et 3 shields. J'ai utilisé (dans l'ordre de l'empilement) :
- Une carte chipKIT UNO32 de Digilent (avec régulateur, PIN 10 comme I/O digitale, SPI master, A4 et A5 en interface I2C),
- Un "Motor shield" d'Adafruit (configuré en 3,3 V, ce shield alimentant la carte UNO32),
- Un "Bluetooth shield" de Seeedstudio (BT_Tx=D0 et BT_Rx=D1),
- Un "LCDKeypad shield" de DFRobot (modifié pour la carte UNO32 tel que décrit ici).
Le "Motor shield"
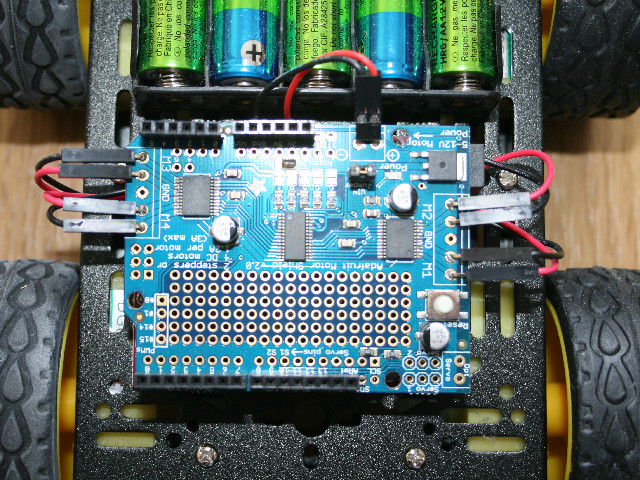
L'alimentation venant de l'interrupteur arrive sur cette carte qui alimente tout le robot (avec le jumper en place comme sur la photo).
La carte est configurée pour des I/O en 3,3 V avec une boule de soudure (en haut et au centre sur la photo).
Les moteurs sont connectés sur la carte comme ils sont implantés physiquement (en bas à droite, le moteur qui est en bas à droite,...). Attention au sens entre les fils rouge et noir pour que les moteurs tournent tous dans le bon sens.
Le "Bluetooth shield"
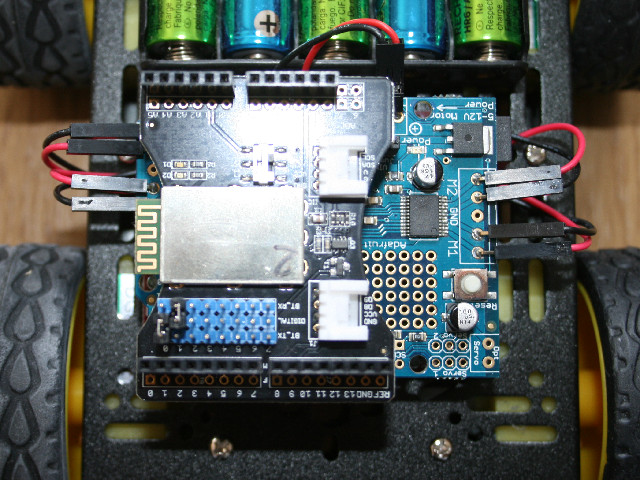
Le module Bluetooth est configuré avec :
- BT_Tx relié à D0 et BT_Rx relié à D1 (d'où un téléchargement du programme dans la carte UNO32 possible que si on a enlevé le shield Bluetooth),
- L'interrupteur tel que la sortie BTStatus arrive sur la broche A1 de la carte Arduino.
Le "LCDKeypad shield"

Le module d'affichage que j'ai utilisé pour les tests et qui maintenant n'affiche qu'un message à la mise sous tension et l'état de la connection entre le module Bluetooth et le téléphone).
Me demander si vous voulez un logiciel compilé pour une configuration sans cette carte.